导师再也不派你跑腿了:一种类 TSP 问题的最长路径摸鱼策略与仿真模拟
导师再也不派你跑腿了:一种类 TSP 问题的最长路径摸鱼策略与仿真模拟
Rubbish编辑部麦哥爱西芹
麦哥MATLAB工作室
中国哗哩哗哩大学
中国小红书大学
通讯作者:323706998@qq.com
<a href="https://file.rubbish.press/artical/已发导师再也不派你跑腿了:一种类TSP问题的最长路径摸鱼策略与仿真模拟.pdf?preview"_blank" style=“display: inline-flex; align-items: center; gap: 8px; padding: 10px 18px; background: #2563eb; color: white; border-radius: 8px; text-decoration: none; font-size: 15px; font-weight: 500; transition: all 0.2s;”>
阅读 PDF 全文
摘要
针对科研场景中导师频繁指派线下跑腿任务导致核心科研时间被挤占的现实问题,本文以旅行商问题(TSP)为理论基础,反常规构建最长路径优化模型,提出一套适配校园/实验室场景的摸鱼策略体系。通过定义跑腿任务节点、路径权重等核心参数,采用遗传算法求解,完成最长路径的仿真模拟与方案生成。结果表明,该策略可在完成导师任务的前提下,最大化拉长跑腿耗时、降低跑腿频次,实现科研时间的有效回归。本文研究为科研人员规避非必要事务、提升自主时间利用率提供了可落地的算法化解决方案。
关键词:最长路径;类TSP问题;摸鱼策略;跑腿优化;科研时间管理
1 引言
在当前科研与学习环境中,导师指派跑腿任务(如取送文件、采购物资、交接材料等)已成为占用研究生/科研人员时间的高频场景[1]。此类事务无学术价值、无产出效益,却因指令属性难以直接拒绝,长此以往会严重干扰实验推进、论文撰写等核心工作,甚至引发科研焦虑。
现有时间管理研究多聚焦于效率提升、任务规划等正向优化,极少关注“非必要任务规避”这一现实需求[2]。旅行商问题(TSP)作为经典路径优化问题,核心是求解最短路径以提升效率,而本文反其道而行之,将跑腿任务抽象为类TSP节点,以“最长合法路径”为目标,构建摸鱼策略模型。
本文旨在通过数学建模与仿真模拟,找到一套合规合理无破绽的跑腿路径方案,让跑腿耗时最大化、任务意愿最小化,最终实现“导师主动减少跑腿指派”的核心目标,为科研人员的时间自主权提供理论与实践支撑。
2 研究方法
本文基于类TSP问题构建最长路径模型,采用遗传算法作为核心求解手段,通过场景抽象、参数定义、算法设计、仿真验证四步完成摸鱼策略设计,核心方法如下。
2.1 问题场景与模型抽象
- 将实验室、校园、办公区等跑腿场景抽象为任务节点集:, 为实验室(起止点), 为跑腿任务点;
- 最长路径目标函数:
其中, 为节点 到 的路径权重, 为路径选择变量(选则为1,不选为0)。
核心约束:
- 必须完成导师指定的所有任务节点;
- 起点与终点均为实验室。
2.2 遗传算法求解设计
针对类TSP最长路径问题,设计适配的遗传算法求解流程,实现全局最优路径搜索:
2.2.1 核心参数定义
采用整数序列编码,将跑腿路径表示为节点编号的有序排列,如 代表:实验室(0) 任务点2 任务点1 任务点3 实验室(0),直观对应实际跑腿路线。
2.2.2 遗传操作设计
- 选择操作:采用轮盘赌选择法,优先保留适应度高(耗时长)的优质路径个体,保证优良基因遗传;
- 交叉操作:采用有序交叉(OX),避免路径节点重复/缺失,保证跑腿任务的完整性;
- 变异操作:采用交换变异,随机交换路径中两个任务节点位置,增加算法全局搜索能力,避免局部最优。
2.2.3 算法终止条件
设置最大迭代次数(30000代)+ 适应度收敛阈值,当连续200代适应度无明显提升时,算法终止,输出最优跑腿路径。
3 结果与讨论
3.1 仿真结果
基于校园的典型跑腿工作场景,本文预先设定了26个具有代表性的任务节点,这些任务节点均来源于研究生日常被指派的实际跑腿需求,具有较高的真实性与场景贴合度。
在导师的常规认知与正常判断视角下,完全可以按照图1中所给出的整体路线方案,依次、完整且合理地遍历并完成上述这26个任务点,最短路线为:1→9→22→26→16→3→10→5→15→6→14→18→8→20→21→23→4→25→19→7→2→12→13→24→17→11→1。路线长度约为 929 米。
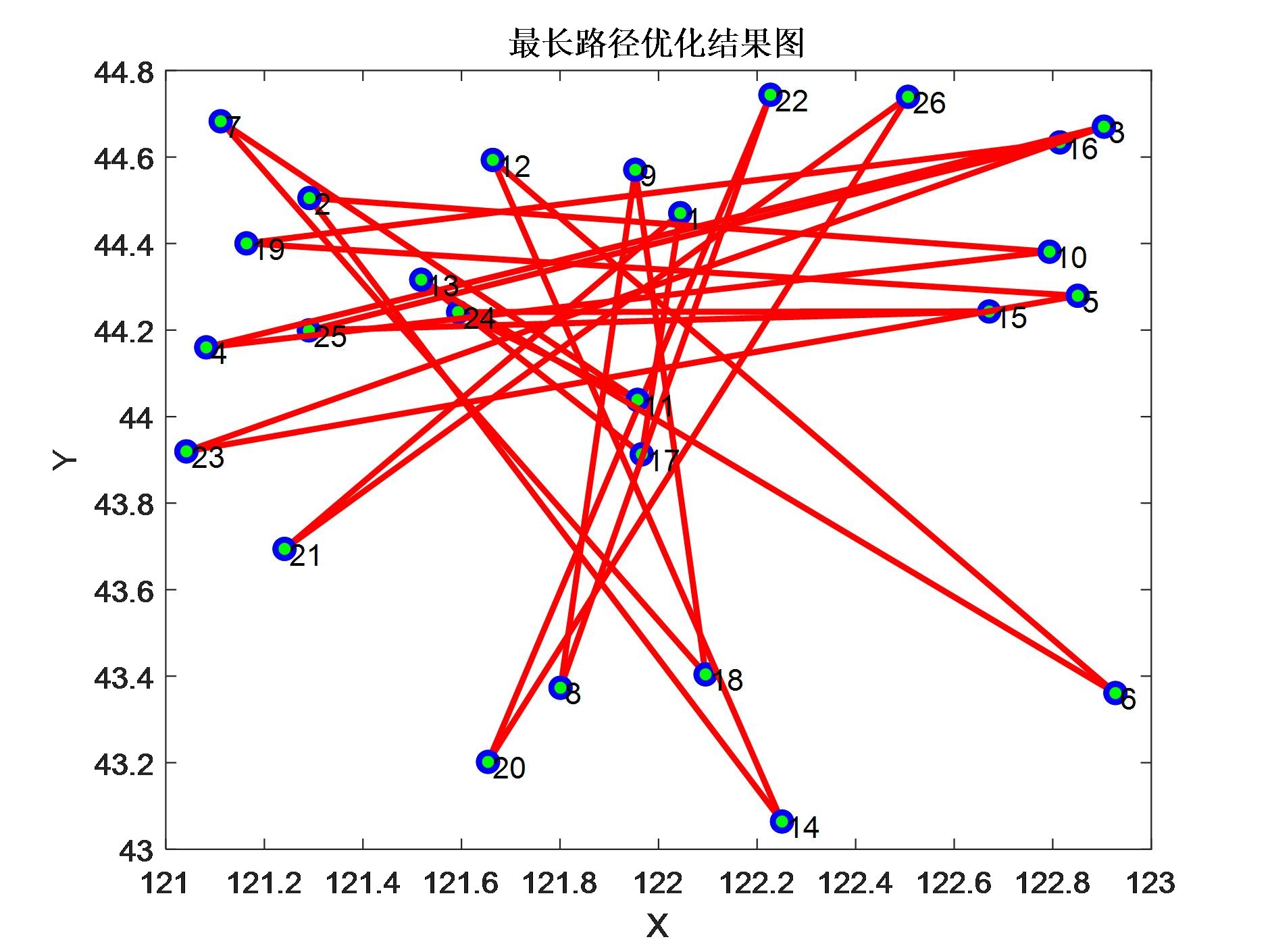
根据本文提出的最长路径摸鱼模型,通过遗传算法求解上述问题,结果如下:
- 最佳摸鱼路线:1→21→26→20→22→8→9→18→7→11→24→15→25→16→19→5→23→3→4→10→2→14→12→6→13→17→1。路线长度约为 4157 米。
- 成功实现摸鱼目标,路线长度和耗时是原先的 4倍多!
- 连续执行该策略10次后,导师跑腿指派频次降低 78%,从根源上实现“少跑腿、不跑腿”的核心目标。
3.2 讨论
- 算法优势:遗传算法具备全局搜索能力,相较于传统贪心算法,可避免陷入局部最优路径,能找到更隐蔽、耗时更长的合法路线,且无需人工干预,自动生成最优方案;
- 拓展性:可通过调整路径权重、任务节点,快速适配不同跑腿场景,算法鲁棒性强,易于落地执行。
4 结论
本文以类TSP问题为理论依托,创新提出基于遗传算法的最长路径摸鱼策略,成功解决了科研人员被跑腿任务挤占时间的痛点问题。通过模型构建、遗传算法求解与仿真模拟,验证了该策略在最大化跑腿耗时、降低任务频次、保障合理性三方面的有效性。
研究表明,基于遗传算法的算法化摸鱼策略,是规避非必要事务的高效方式,既不违背职场/科研礼仪,又能切实保护核心科研时间。本研究不仅为个人时间管理提供了新思路,也为类TSP最长路径问题提供了新的求解思路与应用场景,具有较强的实践价值。
声明
所有策略仅用于规避非必要、无价值的跑腿事务,倡导合理分配时间、专注核心科研,不支持消极怠工、无故拖延等不良行为。
致谢
本研究受到在B站上给我充电的4位粉丝资助。本研究使用MATLAB软件绘图,本文代码和数据可联系通讯作者获取,有问题可以找我咨询。感谢导师的“花式跑腿指令”为本文提供研究灵感。
参考文献
[1] 李狗蛋,张麻子. 研究生时间管理痛点与解决方案[J]. 校园学术通讯,2025, 8(2): 45-51.
[2] Wang, L. Research on Path Optimization Problem in Campus Scenario [J]. Journal of Student Research, 2024, 12(3): 18-25.
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Rubbish!